L6561,L5652 是 ST 公司的 APFC (Active Power Factor Corrector, 主动功率因数校正器) 芯片.
在环保节能绿色时代, 功率因数也成为电器的一个重要指标. 由于家用电器往往不是纯电阻性的, 负载带一定的电容或者是电感, 如开关变压器的线圈等.
这些非纯电阻的电抗元件会造成电压和电流的相位差.
功率因数指的是电流和电压的相位差的余弦值 cosφ.
功率因数越高, 相位差越小, 效率也有相应的提升.
APFC 电路就是一种能主动匹配负载的功率因数并且进行校正的电路.
当然, APFC 电路本身也要耗能, 有些电路本身效率就很高, 就没有必要使用 APFC 了. 被动式 PFC 相对成本就小, 当然成本计算不在我的讨论范围之内.
电路图请参考官方 L6561 的 图4, Typical Application Circuit (120W, 220VAC).
C1 的作用是交流输入滤波, 由于 APFC 电路的性质, 去掉也能很好的工作, 就是会降低一点点效率.
R9, R10 构成分压网络, 检测输入电压波形. C7 用于去耦滤波.
R3 是启动分压电阻, 和芯片内部的 20V 稳压二极管构成稳压电路给芯片启动时的供电.
T 的初级是储能电感, 按照图给出的参数绕到 0.8mH 就可以正常工作.
T 的次级有两个作用, 一个是感应出当前电流并通过 R1 降压输入到芯片的 5 脚进行过零检测. 另外作用是辅助供电.
辅助供电输出的电压通过 R2, C6 的滤波, D2 的稳压二极管进行降压滤波. D2 的稳压电压一般取 18V.
等芯片正常工作后, 供电主要由 T 来供, 芯片 8 脚的电压由 12V变成18V, 同时 MOS 管的栅极驱动电压也上升了, 能让MOS管快速饱和降低能耗.
D3 的作用是防止启动电压倒流到 T 的次级. 由于芯片上电时候 BOOST MOS 没有工作, T 的次级没有感应电压, 所以倒流是很危险的. D3 用 4148 就可以工作.
C2 是输入电源的滤波电容, 值可以取大一点. 同时要并联小电容.
R5,MOS,T,D1 构成了典型的 BOOST 电路, D1 用几个 FR107 并联就可以了.MOS 用 6N60 就可以工作, 太大没有必要.
R6 的作用和 UC3842 中的源级电阻差不多, 反正都是检测电流用的.
R7, R8 构成分压网络, 决定输出电压. 输出在 400V 的时候效率最高, 1 脚的电压是 2.5V, 所以还是老老实实算吧.
C3 是补偿电容.最好旁路接一个 10nF 电容串联 2K 的电阻.
C5 是输出滤波电容.
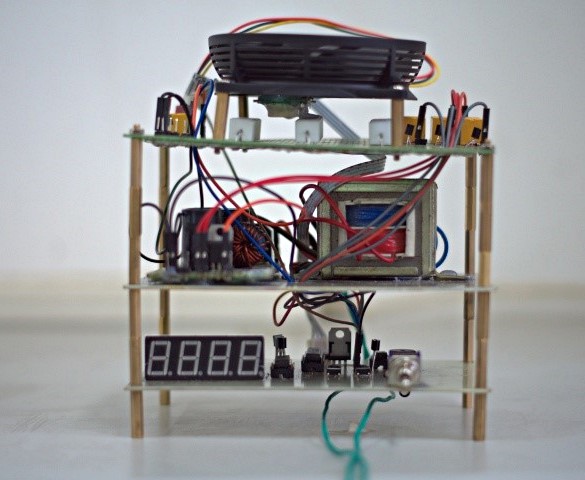
检查电路后就上电测试.负载用 2 个 25W 灯泡串联即可.
注意高压危险, 调试前请默念 "春哥纯爷们" .
工作正常的特征是上电灯泡比较暗, 过 1 秒不到灯泡正常工作. 输出电压 400V直流.
如果灯泡比单独接入 220V 暗, 就是没有工作. 确认元件正常的情况下, 减少 R3 的值, 使 8 脚能测到 12V 左右的电压. 电阻不要调得太小, 降低效率. 我自己用了 300K.
如果还是不行, 变压器次级多绕一圈, 再试. 不能绕太多, 变压器次级用示波器测试的电压正峰值在 20V 左右就可以了. 否则在 D2, R2 上的耗能会上升.
一般来说不工作就是供电的问题. 可以外接稳压电源试试.
线圈多绕 R1 也要增加, 5脚电压峰值取5V就可以了, 太小检测不到过零, 太大能耗上升.
电路的效率一般都能做到 90 以上, 功率因数一般能做到 98 以上. 输出功率最大 100W 左右, 适合用在笔记本电脑电源, 大型 LED 路灯, 电动车充电器上.
Comments